




1. ņä£ ļĪĀ
ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ (strain sensor)ļŖö ņÖĖļČĆņŚÉņä£ ņØĖĻ░ĆļÉśļŖö ĒלņŚÉ ļö░ļØ╝ ļīĆņāüļ¼╝ņŚÉ ļ░£ņāØļÉśļŖö ņŖżĒŖĖļĀłņØĖ (ļ│ĆĒśĢļźĀ)ņØä Ļ░Éņ¦ĆĒĢśļŖö ņåīņ×ÉļĪ£ ņĄ£ĻĘ╝ņŚÉļŖö ĻĖ░Ļ│äņĀü ņ£ĀņŚ░ņä▒ (flexibility) ļ░Å ņŗĀņČĢņä▒ (stretchability)ņØä ĻĖ░ļ░śņ£╝ļĪ£ ņØĖņ▓┤ņØś ļŗżņ¢æĒĢ£ ļČĆņ£äņŚÉ ņ¦üņĀæ ļČĆņ░®ļÉśņ¢┤ ņØĖņ▓┤ņØś Ēü¼Ļ│Ā ņ×æņØĆ ņøĆņ¦üņ×äņØä ņŗżņŗ£Ļ░äņ£╝ļĪ£ Ļ░Éņ¦ĆĒĢĀ ņłś ņ׳ļŖö ĒśĢĒā£ļĪ£ Ļ░£ļ░£ļÉśĻ│Ā ņ׳ņ£╝ļ®░, ņ░©ņäĖļīĆ Ļ░£ņØĖ Ļ▒┤Ļ░Ģ ļ¬©ļŗłĒä░ļ¦ü (personal health monitoring) ļČäņĢ╝ņØś ĒĢĄņŗ¼ ĻĖ░ņłĀļĪ£ ņĀüņÜ®ĒĢśĻĖ░ ņ£äĒĢ£ ĒÖ£ļ░£ĒĢ£ ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż [1].
ņØ┤ļ¤¼ĒĢ£ ņŗĀņČĢņä▒ ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ ĻĄ¼ĒśäņŚÉ ņ׳ņ¢┤ Ļ░Ćņן ņżæņÜöĒĢ£ ņÜöņåīļŖö ņÖĖļČĆņŚÉņä£ Ļ░ĆĒĢ┤ņ¦ĆļŖö ĒלņŚÉ ļīĆĒĢ┤ ļåÆņØĆ ņŖżĒŖĖļĀłņØĖ ļ»╝Ļ░ÉļÅä (sensitivity)ņÖĆ ļäōņØĆ Ļ░Éņ¦Ć ļ▓öņ£ä (detection range)ļź╝ Ļ░¢ļŖö ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ (pieozoresistive electrode)ņØä Ļ░£ļ░£ĒĢśļŖö Ļ▓āņØ┤ļŗż. ņØ┤ļź╝ ņ£äĒĢ┤ Ēśäņ×¼ ĻĖłņåŹ ļéśļģĖņäĀ (nanowires, NWs) [2-4], ĻĖłņåŹ ļéśļģĖņ×ģņ×É (nanoparticles, NPs) [5,6], Ēāäņåī ļéśļģĖĒŖ£ļĖī (carbon nanotubes, CNTs) [7,8], CNT ņŗ£ĒŖĖ (sheet) [9-11], ņ╣┤ļ│Ė ļĖöļ×Ö ļéśļģĖņ×ģņ×É (carbon black (CB) NPs) [12,13], ĻĘĖļלĒĢĆ ĒĢäļ”ä (graphene films) [14-17], ĒĢśņØ┤ļĖīļ”¼ļō£ (hybrid) ĻĄ¼ņĪ░ [18-22] ļō▒ ņĀäļÅäņä▒ ļéśļģĖļ¼╝ņ¦ł (conductive nanomaterials) ĻĖ░ļ░śņØś ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØ┤ ĒÖ£ļ░£Ē׳ Ļ░£ļ░£ļÉśĻ│Ā ņ׳ņ£╝ļ®░, ņŗĀņČĢņä▒ ĻĖ░ĒīÉĻ│╝ņØś Ļ▓░ĒĢ®ņØä ĒåĄĒĢ┤ ļŗżņ¢æĒĢ£ ĒśĢĒā£ņØś ņŗĀņČĢņä▒ ņŖżĒŖĖļĀłņØĖ ņä╝ņä£Ļ░Ć ĻĄ¼ĒśäļÉśĻ│Ā ņ׳ļŗż.
ņĀäļÅäņä▒ ļéśļģĖļ¼╝ņ¦ł ĻĖ░ļ░ś ņŗĀņČĢņä▒ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØĆ ņØ╝ļ░śņĀüņ£╝ļĪ£ ņÖĖļĀźņØ┤ ņØĖĻ░ĆļÉĀ ļĢī ņĀäĻĘ╣ņØä ĻĄ¼ņä▒ĒĢśļŖö ņĀäļÅäņä▒ ļéśļģĖļ¼╝ņ¦ł ļäżĒŖĖņøīĒü¼ (network) ņāüņŚÉ ļ░£ņāØļÉśļŖö ļ│ĆĒśĢņŚÉ ņØśĒĢ┤ ņĀäļźś ĒåĄļĪ£ (current pathway)ļź╝ ņ×āņ¢┤ ņĀäĻĖ░ ņĀĆĒĢŁ (electrical resistance)ņØ┤ ņ”ØĻ░ĆĒĢśļŖö ļÅÖņ×æ ņøÉļ”¼ļź╝ Ļ░Ćņ¦Ćļ®░, ĻĖ░ņĪ┤ ĻĖłņåŹ ĒżņØ╝ (metal foil) ĻĖ░ļ░śņØś ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ņŚÉ ļ╣äĒĢ┤ ļ»╝Ļ░ÉļÅäņÖĆ Ļ░Éņ¦Ć ļ▓öņ£äļź╝ ļÅÖņŗ£ņŚÉ Ļ░£ņäĀĒĢĀ ņłś ņ׳ļŖö ņןņĀÉņØä Ļ░¢ļŖöļŗż. ĒĢśņ¦Ćļ¦ī Ēśäņ×¼ ļ│┤Ļ│ĀļÉśĻ│Ā ņ׳ļŖö ļīĆļČĆļČäņØś ņŗĀņČĢņä▒ ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļŖö ņŻ╝ļĪ£ ļŗ©ņČĢ (single axis) ļ░®Ē¢ź ņŖżĒŖĖļĀłņØĖņØä Ļ░Éņ¦ĆĒĢśļŖö ĻĄ¼ņĪ░ļź╝ ļØäĻ│Ā ņ׳ņ¢┤ ņÖĖļĀźņØä ņĀĢĒÖĢĒ׳ Ļ░Éņ¦ĆĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņŖżĒŖĖļĀłņØĖņØ┤ ļ░£ņāØļÉśļŖö ņČĢņŚÉ ņä╝ņä£Ļ░Ć ņĀĢļĀ¼ļÉśņ¢┤ņĢ╝ ĒĢśļ»ĆļĪ£ ļ│┤ļŗż ļ│Ąņ×ĪĒĢ£ ļŗżņČĢ (multiaxis) ņÖĖļĀźņØä Ļ░Éņ¦ĆĒĢśļŖö ļŹ░ļŖö ņ¢┤ļĀżņøĆņØ┤ ņ׳ļŗż. ņØ┤ļŖö Ļ▓░ĻĄŁ ņ×äņØśņØś ļ░®Ē¢źĻ│╝ Ēü¼ĻĖ░ņØś ņŖżĒŖĖļĀłņØĖņØä ļ░£ņāØņŗ£ĒéżļŖö ņØĖņ▓┤ņØś ļŗżņ¢æĒĢ£ ņøĆņ¦üņ×äņØä ņĀĢĒÖĢĒĢśĻ▓ī ņĖĪņĀĢĒĢśļŖö ļŹ░ ņ׳ņ¢┤ ĻĖ░ņłĀņĀüņØĖ ĒĢ£Ļ│äļź╝ ļō£ļ¤¼ļé┤Ļ│Ā ņ׳ņØīņØä ņØśļ»ĖĒĢ£ļŗż.
ņØ┤ļ¤¼ĒĢ£ ĻĖ░ņĪ┤ ļŗ©ņČĢ ņä╝ņä£ņØś ļ¼ĖņĀ£ņĀÉņØä ĻĘ╣ļ│ĄĒĢśĻĖ░ ņ£äĒĢ┤ ļ│ĄņłśņØś ļŗ©ņ£ä ņä╝ņä£ļź╝ ņØ╝ņĀĢ Ļ░üļÅäļĪ£ ļ░░ņŚ┤ĒĢśņŚ¼ ņ×äņØśņØś ņÖĖļĀźņŚÉ ļīĆĒĢ┤ ņŻ╝ (principal) ņŖżĒŖĖļĀłņØĖņØś Ēü¼ĻĖ░ņÖĆ ļ░®Ē¢źņØä Ļ░Éņ¦ĆĒĢĀ ņłś ņ׳ļŖö ļĪ£ņĀ» ĒāĆņ×ģ (rosette-type) ņŗĀņČĢņä▒ ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ ņ£äĒĢ£ ļŗżņ¢æĒĢ£ ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż [7,12,14]. X. Wang ļō▒ņØĆ ņ╗┤Ēō©Ēä░ ņĀ£ņ¢┤Ļ░Ć Ļ░ĆļŖźĒĢ£ ļČäļ¼┤ ņ”Øņ░® Ēöäļ”░Ēīģ (spray deposition printing) ĻĖ░ņłĀņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗĀņČĢņä▒ ĒÅ┤ļ”¼ļööļ®öĒŗĖņŗżļĪØņé░ (polydimethylsiloxane, PDMS) ĻĖ░ĒīÉ ņāüņŚÉ CNT ņ×ēĒü¼ (ink)ļź╝ ņ¦üņĀæ ļČäņé¼ĒĢśņŚ¼ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ Ēī©Ēä┤ņØä ĒśĢņä▒ĒĢśļŖö ļ░®ļ▓ĢņØä ĒåĄĒĢ┤ 3ņČĢ ļĪ£ņĀ» ņä╝ņä£ļź╝ ņä▒Ļ│ĄņĀüņ£╝ļĪ£ ĻĄ¼ĒśäĒĢśņśĆļŗż [7]. ĒĢśņ¦Ćļ¦ī ņØ┤ļŖö ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ Ēī©Ēä░ļŗØ (patterning)ņØä ņ£äĒĢ┤ ļ│Ąņ×ĪĒĢ£ ņןņ╣śĻ░Ć ĒĢäņÜöĒĢśļ®░, ņ¦üņĀæ ņØĖņćä (direct writing) ļ░®ņŗØņØś ĒŖ╣ņä▒ ņāü ļ╣äĻĄÉņĀü ĻĖ┤ Ļ│ĄņĀĢ ņŗ£Ļ░äņØ┤ ņÜöĻĄ¼ļÉśļŖö ļ¼ĖņĀ£ņĀÉņØä Ļ░¢ļŖöļŗż. J.-H Kong ļō▒ņØĆ ņåīĒöäĒŖĖļ”¼ņåīĻĘĖĒī©Ēö╝ (soft-lithography) ĻĖ░ļ░ś PDMS ņŖżĒā¼Ēöä (stamp)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĀäļÅäņä▒ CB/PDMS ļ│ĄĒĢ®ņ▓┤ (composite) ņ×ēĒü¼ Ēī©Ēä░ļŗØņØä ņ£äĒĢ£ ņĀæņ┤ē ņĀäņé¼ Ēöäļ”░Ēīģ (contact transfer printing) ĻĖ░ņłĀņØä ņĀ£ņĢłĒĢśņśĆņ£╝ļ®░, ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņØ╝ĒÜīņØś ņĀæņ┤ē ņĀäņé¼ Ļ│ĄņĀĢņØä ĒåĄĒĢ┤ 3ņČĢ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļź╝ ĻĄ¼ĒśäĒĢśņśĆļŗż [12]. ĒĢśņ¦Ćļ¦ī ņØ┤ļŖö ļĪ£ņĀ» ĻĄ¼ņĪ░ļĪ£ ļ░░ņŚ┤ļÉ£ Ļ░£ļ│ä ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ļōżņØ┤ ņä£ļĪ£ ņ£Āņé¼ĒĢ£ ņĢĢņĀĆĒĢŁ ĒŖ╣ņä▒ņØä Ļ░¢ĻĖ░ ņ£äĒĢ┤ņä£ļŖö ĻĘĀņØ╝ĒĢ£ ļČäĒżļź╝ Ļ░¢ļŖö ņĀäļÅäņä▒ ļ│ĄĒĢ®ņ▓┤ ņ×ēĒü¼ ĒĢ®ņä▒ ļ░Å ņĀæņ┤ē ņĀäņé¼ Ļ│ĄņĀĢ ņĪ░Ļ▒┤ņØś ņĄ£ņĀüĒÖöĻ░Ć ņłśļ░śļÉśņ¢┤ņĢ╝ ĒĢśļŖö Ļ╣īļŗżļĪ£ņøĆņØä ļ│┤ņØĖļŗż. S.-H. Bae ļō▒ņØĆ ĒżĒåĀļ”¼ņåīĻĘĖļלĒö╝ (photolithography) ļ░Å ļ░śņØæņä▒ ņØ┤ņś© ņŗØĻ░ü (reactive ion etching) ĻĖ░ņłĀņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĻĘĖļלĒĢĆ ĒĢäļ”äņØä Ēī©Ēä░ļŗØĒĢśļŖö ļ░®ļ▓ĢņØä ĒåĄĒĢ┤ Ēł¼ļ¬ģĒĢ£ 3ņČĢ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļź╝ ĻĄ¼ĒśäĒĢśņśĆļŗż [14]. ĒĢśņ¦Ćļ¦ī ņØ┤ļŖö ĻĘĖļלĒĢĆ ĒĢäļ”ä ĒĢ®ņä▒ņØä ņ£äĒĢ£ ņ¦äĻ│Ą (vacuum) ņןļ╣äĻ░Ć ņÜöĻĄ¼ļÉśļ®░, ļŗżļŗ©Ļ│äņØś ĻĘĖļלĒĢĆ ĒĢäļ”ä Ēī©Ēä░ļŗØ ļ░Å ņĀäņé¼ (transfer) Ļ│╝ņĀĢņØä ĒżĒĢ©ĒĢśĻ│Ā ņ׳ņ¢┤ Ļ│ĄņĀĢņØ┤ ļ╣äĻĄÉņĀü ļ│Ąņ×ĪĒĢ£ ļ¼ĖņĀ£ņĀÉņØä Ļ░¢ļŖöļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Ēģīņ×ÄĒśĢ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ (tape-type shadow mask) ļ░Å ņØĆ ļéśļģĖņäĀ (silver nanowire, AgNW) ļō£ļĪŁ ņĮöĒīģ (drop-coating) Ļ│ĄņĀĢņØä Ļ▓░ĒĢ®ĒĢśņŚ¼ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä ņĀĢļ░ĆĒĢśĻ▓ī Ēī©Ēä░ļŗØĒĢśĻ│Ā ņŗĀņČĢņä▒ ĻĖ░ĒīÉņ£╝ļĪ£ ņ╣©Ēł¼ ņĀäņé¼ĒĢśļŖö ļ░®ļ▓ĢņØä ĒåĄĒĢ┤ ņŗĀņČĢņä▒ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļź╝ ĻĄ¼ĒśäĒĢśņśĆļŗż. ņĀ£ņ×æļÉ£ ņä╝ņä£ļź╝ ĻĄ¼ņä▒ĒĢśļŖö AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś ņäĖļČĆ ĻĄ¼ņĪ░ ļ░Å ņØĖņן (stretching)ņŚÉ ļö░ļźĖ ĒśĢņāü ļ│ĆĒÖöļź╝ ļ®┤ļ░ĆĒ׳ Ļ┤Ćņ░░ĒĢśņśĆņ£╝ļ®░, ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņØĖņןņŚÉ ļīĆĒĢ£ ņä╝ņä£ņØś ņĢĢņĀĆĒĢŁ ĒŖ╣ņä▒ņØä ĒÅēĻ░Ć/ļČäņäØĒĢ©ņ£╝ļĪ£ņŹ© ļŗżņČĢ ņä╝ņä£ļĪ£ņØś ĒÖ£ņÜ® Ļ░ĆļŖźņä▒ņØä Ļ▓Ćņ”ØĒĢśņśĆļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņĢłĒĢśļŖö ņä╝ņä£ ĻĄ¼Ēśä ĻĖ░ņłĀņØĆ ļ│Ąņ×ĪĒĢśĻ│Ā Ļ░Æļ╣äņŗ╝ ņןļ╣äļź╝ ĒĢäņÜöļĪ£ ĒĢśņ¦Ć ņĢŖņ£╝ļ®░, Ļ░äļŗ©ĒĢśĻ│Ā ļ╣ĀļźĖ ņÜ®ņĢĪ Ļ│ĄņĀĢ (solution process)ņØä ĻĖ░ļ░śņ£╝ļĪ£ ļ╣äĻĄÉņĀü ņĀĢļ░ĆĒĢ£ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä ĒśĢņä▒ĒĢĀ ņłś ņ׳ļŖö ņןņĀÉņ£╝ļĪ£ ņØĖĒĢ┤ ĻĖ░ņĪ┤ ļĪ£ņĀ» ņä╝ņä£ ĻĖ░ņłĀņØś ļ¼ĖņĀ£ņĀÉņØä ĻĘ╣ļ│ĄĒĢĀ ņłś ņ׳ļŖö ļīĆņĢł ĻĖ░ņłĀļĪ£ ĒÖ£ņÜ®ļÉĀ ņłś ņ׳ņØä Ļ▓āņ£╝ļĪ£ ĻĖ░ļīĆļÉ£ļŗż.
2. ņŗżĒŚś ļ░®ļ▓Ģ
2.1 ņØĆ ļéśļģĖņäĀ ĒĢ®ņä▒
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņÜ░ņłśĒĢ£ ņĀäĻĖ░ņĀü, Ļ┤æĒĢÖņĀü, ĻĖ░Ļ│äņĀü ĒŖ╣ņä▒ņØä Ļ░¢ļŖö AgNWļź╝ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ ļ¼╝ņ¦łļĪ£ ĒÖ£ņÜ®ĒĢśņśĆņ£╝ļ®░, AgNWļŖö ņŚ╝ĒÖö ņĀ£2ĻĄ¼ļ”¼ (copper(II) chloride, CuCl2) ļ¦żĻ░£ ĒÅ┤ļ”¼ņś¼ (polyol) ļ▓ĢņØä ĻĖ░ļ░śņ£╝ļĪ£ ĒĢ®ņä▒ĒĢśņśĆļŗż [23]. ĒĢ®ņä▒ Ļ│╝ņĀĢņØä Ļ░äļŗ©Ē׳ ņÜöņĢĮĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż. ļ©╝ņĀĆ 160 ┬░CņØś ņś©ļÅäļĪ£ 1 ņŗ£Ļ░ä ļÅÖņĢł ņśłņŚ┤ļÉ£ ņŚÉĒŗĖļĀī ĻĖĆļ”¼ņĮ£ (ethylene glycol, EG) 10 mLņŚÉ 4 mM CuCl2 40 ╬╝Lļź╝ ļäŻĻ│Ā 360 rpmņØś ĒÜīņĀä ņåŹļÅäļĪ£ ĻĄÉļ░śĒĢśļ®┤ņä£ 15ļČä ļÅÖņĢł ņ£Āņ¦ĆĒĢśņśĆļŗż. Ļ░üĻ░ü 10 mLņØś EGņŚÉ ļģ╣ņØĖ 0.3 M ĒÅ┤ļ”¼ļ╣äļŗÉĒö╝ļĪżļ”¼ļÅł (polyvinyl pyrrolidone, PVP) 3 mLņÖĆ 0.1 M ņ¦łņé░ņØĆ (silver nitrate, AgNO3) 3 mLļź╝ 2 ņ▒äļäÉ ņŗ£ļ”░ņ¦Ć ĒÄīĒöä (two-channel syringe pump; Legato 111, KD Scientific)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņżĆļ╣äļÉ£ CuCl2/EG ņÜ®ņĢĪņŚÉ ņŻ╝ņ×ģĒĢ£ Ēøä 1 ņŗ£Ļ░ä ļÅÖņĢł ļ░śņØæņŗ£ņ╝░ļŗż. ļ░śņØæ Ļ│╝ņĀĢ ņżæņŚÉļŖö 160 ┬░CņØś ņś©ļÅäņÖĆ 360 rpmņØś ĻĄÉļ░ś ņåŹļÅäļź╝ ņ£Āņ¦ĆĒĢśņśĆļŗż. ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ ĒĢ®ņä▒ļÉ£ AgNWļź╝ ņøÉņŗ¼ļČäļ”¼ĻĖ░ (centrifuge; TD4Z-WS, Nasco Korea)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņČ®ļČäĒ׳ ņĀĢņĀ£ĒĢ£ Ēøä 5mg/mLņØś ļåŹļÅäļĪ£ ĒāłņØ┤ņś©ņłś (deionized water)ņŚÉ ļČäņé░ĒĢ©ņ£╝ļĪ£ņŹ© ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ ĒśĢņä▒ņØä ņ£äĒĢ£ ļō£ļĪŁ ņĮöĒīģ ņÜ®ņĢĪņØä ņżĆļ╣äĒĢśņśĆļŗż.
2.2 ņä╝ņä£ ņĀ£ņ×æ
AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä ņĀ£ņ×æĒĢśĻĖ░ ņ£äĒĢ┤ ļ©╝ņĀĆ ņ║Éļō£ (computer aided design; CAD) ĻĖ░ļ░ś ņ×ÉļÅÖ ĒöīļĪ£Ēä░ (automatic plotter; Cameo, Silhouette)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĒÅ┤ļ”¼ņØ┤ļ»Ėļō£ (polyimide, PI) Ēģīņ×ÄņŚÉ ļĪ£ņĀ» Ēī©Ēä┤ ĒÖĆņØä ĒśĢņä▒ĒĢśņŚ¼ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ļź╝ ņżĆļ╣äĒĢśņśĆļŗż. ĻĘĖ Ēøä ļÅäļäł (donor) ĻĖ░ĒīÉņ£╝ļĪ£ ņé¼ņÜ®ļÉśļŖö PI ĒĢäļ”äņŚÉ ņĀ£ņ×æļÉ£ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ Ēģīņ×ÄņØä ļ░Ćņ░®ĒĢśņŚ¼ ļČĆņ░®ĒĢśĻ│Ā, ĻĘĖ ņ£äņŚÉ ņżĆļ╣äļÉ£ AgNW ņÜ®ņĢĪņØä ļō£ļĪŁ ņĮöĒīģĒĢśņśĆļŗż. 70 ┬░C ņś©ļÅäņØś ļīĆļźś ņśżļĖÉ (convection oven; ON-11E, JEIO TECH)ņŚÉ ņāśĒöīņØä ņ£Āņ¦ĆĒĢśņŚ¼ ņÜ®ļ¦żļź╝ ņ”Øļ░£ņŗ£Ēé© Ēøä ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ Ēģīņ×ÄņØä ņĀ£Ļ▒░ĒĢ©ņ£╝ļĪ£ņŹ© AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä Ēī©Ēä░ļŗØĒĢśņśĆņ£╝ļ®░, ņĀäĻĘ╣ņØś ņĀäĻĖ░ ņĀäļÅäļÅä Ļ░£ņäĀņØä ņ£äĒĢ┤ 200 ┬░CņØś ņś©ļÅäņŚÉņä£ 1 ņŗ£Ļ░ä ļÅÖņĢł ņŚ┤ņ▓śļ”¼ (thermal annealing)ļź╝ ņłśĒ¢ēĒĢśņśĆļŗż. ĻĘĖ Ēøä, ņŻ╝ņĀ£ņÖĆ Ļ▓ĮĒÖöņĀ£Ļ░Ć 10:1ņØś ņ¦łļ¤ēļ╣ä (weight ratio)ļĪ£ Ēś╝ĒĢ®ļÉ£ PDMS ņÜ®ņĢĪņØä PI ĻĖ░ĒīÉņŚÉ Ēī©Ēä░ļŗØļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņāüņŚÉ ļČōĻ│Ā 70 ┬░CņØś ņś©ļÅäņŚÉņä£ 1 ņŗ£Ļ░ä ļÅÖņĢł Ļ▓ĮĒÖöņŗ£ņ╝░ņ£╝ļ®░, Ļ▓ĮĒÖöļÉ£ PDMS ĻĖ░ĒīÉņØä PI ĒĢäļ”äņ£╝ļĪ£ļČĆĒä░ ļČäļ”¼ĒĢśņŚ¼ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä PDMS ĻĖ░ĒīÉ ņ¬Įņ£╝ļĪ£ ņ╣©Ēł¼ ņĀäņé¼ĒĢśļŖö Ļ│╝ņĀĢņØä ĒåĄĒĢ┤ ņä╝ņä£ ņĀ£ņ×æņØä ņÖäļŻīĒĢśņśĆļŗż. ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ ņä╝ņä£ ņä▒ļŖź ĒÅēĻ░Ćļź╝ ņ£äĒĢ┤ ņØĆ ĒÄśņØ┤ņŖżĒŖĖ (silver paste)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņä╝ņä£ņØś ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņŚÉ ņĀäņäĀ (electric wire)ņØä ņŚ░Ļ▓░ĒĢ£ Ēøä PDMS ļ│┤ĒśĖņĖĄ (protection layer)ņØä ņĮöĒīģĒĢśņśĆļŗż.
2.3 ĒśĢņāü Ļ┤Ćņ░░ ļ░Å ņä╝ņä£ ņä▒ļŖź ĒÅēĻ░Ć
ņĀ£ņ×æļÉ£ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś ĒśĢņāü, ļé┤ļČĆ AgNW ļäżĒŖĖņøīĒü¼ ĻĄ¼ņĪ░ ļ░Å ņØĖņןņŚÉ ļö░ļźĖ ņĀäĻĘ╣ņØś Ēæ£ļ®┤ ĒśĢņāü ļ│ĆĒÖöļŖö ņĀäņ×ÉņŻ╝ņé¼Ēśäļ»ĖĻ▓Į (scanning electron microscope, SEM; SNE-3200M, SEC)Ļ│╝ Ļ┤æĒĢÖĒśäļ»ĖĻ▓Į (optical microscope, OM; BX60M, Olympus)ņØä ņØ┤ņÜ®ĒĢśņŚ¼ Ļ┤Ćņ░░ĒĢśņśĆļŗż.
ņä╝ņä£ņØś ņŖżĒŖĖļĀłņØĖ Ļ░Éņ¦Ć ņä▒ļŖź ĒÅēĻ░Ćļź╝ ņ£äĒĢ┤ ņĀ£ņ×æļÉ£ ņä╝ņä£ļź╝ ņ╗┤Ēō©Ēä░ ņĀ£ņ¢┤ ņĀäļÅÖ ņŖżĒģīņØ┤ņ¦Ć (motorized stage; JSV-H100, JISC)ņØś ņ¦ĆĻĘĖ (Jig)ņŚÉ ņŚ░Ļ▓░ĒĢśņŚ¼ 2 mm/minņØś ņåŹļÅäļĪ£ ņØĖņןĒĢśņśĆņ£╝ļ®░, ņØ┤ņÖĆ ļÅÖņŗ£ņŚÉ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ ņ¢æļŗ©ņŚÉ ņŚ░Ļ▓░ļÉ£ ļööņ¦ĆĒäĖ ļ®ĆĒŗ░ļ»ĖĒä░ (digital multimeter; 34465A, Keysight Technologies)ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņØĖņן ļīĆļ╣ä ņĀĆĒĢŁ ļ│ĆĒÖöļź╝ ņŗżņŗ£Ļ░äņ£╝ļĪ£ Ļ┤Ćņ░░ĒĢśņśĆļŗż.
3. Ļ▓░Ļ│╝ ļ░Å Ļ│Āņ░░
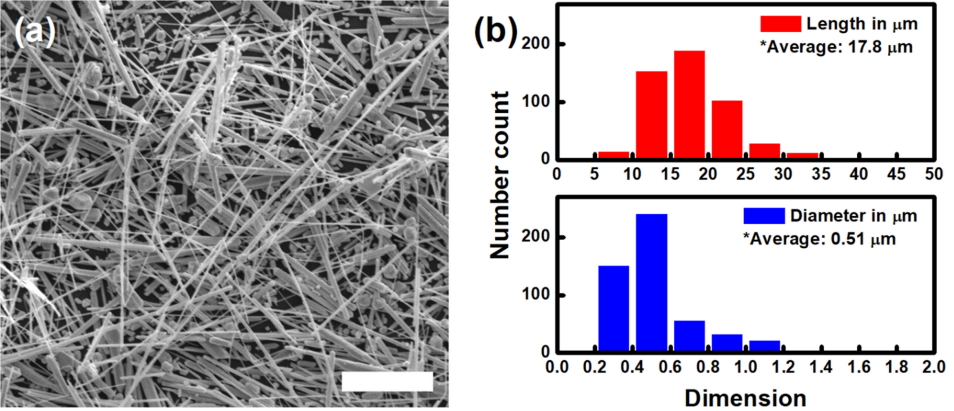
ĻĘĖļ”╝ 1(a)ļŖö ĒÅ┤ļ”¼ņś¼ ļ▓ĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒĢ®ņä▒ļÉ£ AgNWņØś SEM ļČäņäØ Ļ▓░Ļ│╝ļź╝ ļ│┤ņŚ¼ņżĆļŗż. ĻĘĖļ”╝ 1(b)ļŖö ĻĘĖļ”╝ 1(a)ņØś SEM ļČäņäØ Ļ▓░Ļ│╝ļź╝ ļ░öĒāĢņ£╝ļĪ£ ņĖĪņĀĢļÉ£ AgNWņØś ĻĖĖņØ┤ (length)ņÖĆ ņ¦üĻ▓Į (diameter)ņØś ļČäĒżļź╝ ļéśĒāĆļéĖļŗż. ņĖĪņĀĢņØĆ ņ×ģņ×É ĒśĢņāüņØä ņĀ£ņÖĖĒĢśĻ│Ā ļ¼┤ņ×æņ£äļĪ£ ņäĀĒāØļÉ£ 500 Ļ░£ņØś AgNWņŚÉ ļīĆĒĢ┤ņä£ ņ¦äĒ¢ēļÉśņŚłļŗż. ĻĘĖļ”╝ 1(b)ņŚÉņä£ ļ│╝ ņłś ņ׳ļŖö ļ░öņÖĆ Ļ░ÖņØ┤ ĒĢ®ņä▒ļÉ£ AgNWņØś ĻĖĖņØ┤ņØś Ļ▓ĮņÜ░ ņĖĪņĀĢ ļīĆņāüņØś 88.6%Ļ░Ć 10~25 ╬╝m ļé┤ņŚÉ, ņ¦üĻ▓ĮņØś Ļ▓ĮņÜ░ 78%Ļ░Ć 0.2~0.6 ╬╝m ļé┤ņŚÉ ļČäĒżĒĢ©ņØä ļ│╝ ņłś ņ׳ļŗż. ļśÉĒĢ£, ĒĢ®ņä▒ļÉ£ AgNWņØś ĒÅēĻĘĀ ĻĖĖņØ┤ņÖĆ ņ¦üĻ▓ĮņØĆ Ļ░üĻ░ü ņĢĮ 17.8 ╬╝mņÖĆ 0.51 ╬╝mļź╝ ļ│┤ņŚ¼ ņĢĮ 35ņØś ļ╣äĻĄÉņĀü ļåÆņØĆ ņóģĒÜĪļ╣ä (aspect ratio)ļź╝ Ļ░¢ļŖö Ļ▓āņ£╝ļĪ£ ĒÖĢņØĖļÉśņŚłļŗż.
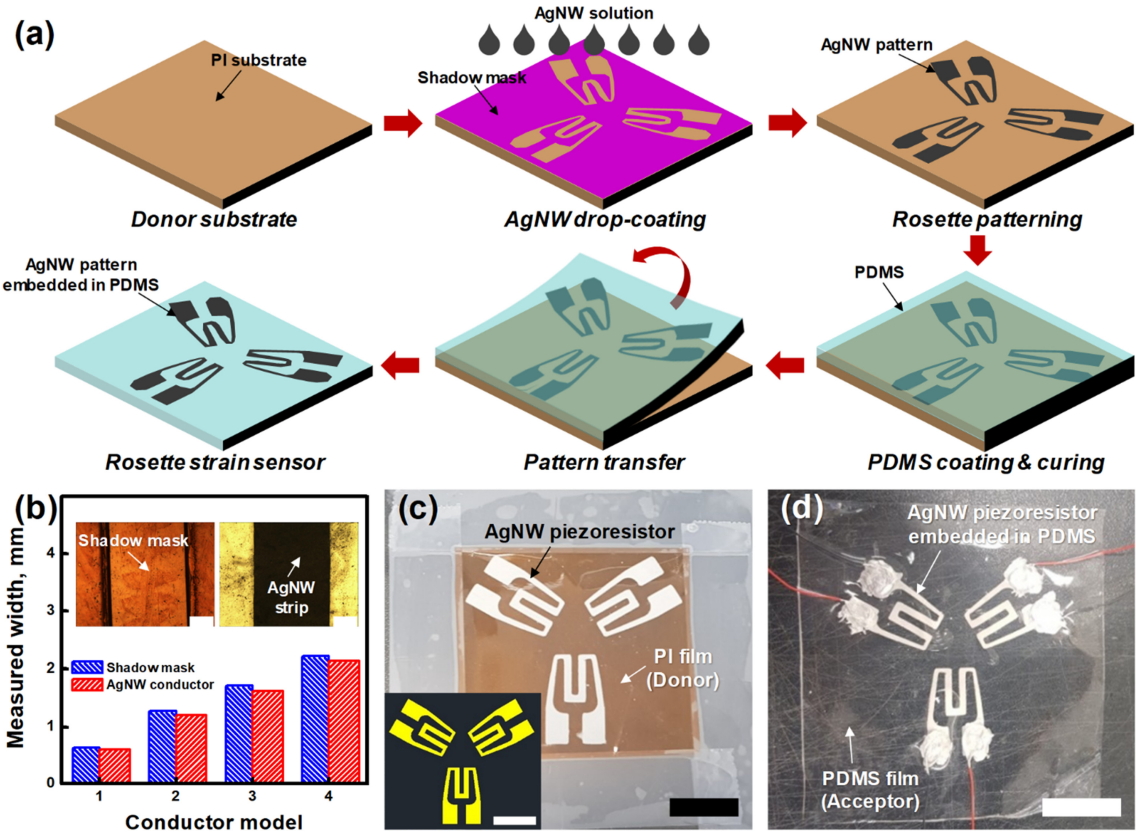
ĻĘĖļ”╝ 2(a)ļŖö ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņĢłĒĢśļŖö ņŗĀņČĢņä▒ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ņØś ņĀ£ņ×æ Ļ│╝ņĀĢ ļ¬©ņŗØļÅäļź╝ ļ│┤ņŚ¼ņŻ╝ļ®░, ņĀäņ▓┤ Ļ│ĄņĀĢ Ļ│╝ņĀĢņØ┤ ļ¦żņÜ░ Ļ░äļŗ©ĒĢ£ ĒŖ╣ņ¦ĢņØä ļéśĒāĆļéĖļŗż. ļō£ļĪŁ ņĮöĒīģ ĻĖ░ņłĀņØĆ Ļ░äļŗ©ĒĢśĻ│Ā ļ╣ĀļźĖ Ļ│ĄņĀĢ ņĖĪļ®┤ņŚÉņä£ņØś ņןņĀÉņ£╝ļĪ£ ņØĖĒĢ┤ ņĀäļÅäņä▒ ļéśļģĖļ¼╝ņ¦ł ĒĢäļ”äņØä ĒśĢņä▒ĒĢśļŖö ļŹ░ ņ׳ņ¢┤ Ļ░Ćņן ņ£ĀņÜ®ĒĢ£ ļ░®ļ▓Ģ ņżæ ĒĢśļéśņØ┤ļŗż. ĒĢśņ¦Ćļ¦ī ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĀäĻĘ╣ Ēī©Ēä┤ņØä ĒśĢņä▒ĒĢĀ ļĢī, ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ņÖĆ ĻĖ░ĒīÉņØ┤ ļ░Ćņ░®ļÉśņ¦Ć ļ¬╗ĒĢśļ®┤ ņĮöĒīģ ņÜ®ņĢĪņØ┤ Ēī©Ēä┤ Ļ▓ĮĻ│äļ®┤ņØä ĒåĄĒĢ┤ ļ¦łņŖżĒü¼ ņĢäļלļĪ£ ņŖżļ®░ļōżņ¢┤ ņĀĢļ░ĆĒĢ£ ņĀäĻĘ╣ ĒśĢņāüņØä ņ¢╗ĻĖ░ ņ¢┤ļĀżņÜ┤ ļ¼ĖņĀ£ņĀÉņØ┤ ņ׳ļŗż. ļö░ļØ╝ņä£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Ēģīņ×ÄĒśĢ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ļź╝ ņĀüņÜ®ĒĢśņŚ¼ ņØ┤ļ¤¼ĒĢ£ ļ¼ĖņĀ£ņĀÉņØä ĒĢ┤Ļ▓░ĒĢśĻ│Āņ×É ĒĢśņśĆļŗż. PI Ēģīņ×ÄņØś ņĀæņ░®ņĖĄ (adhesion layer)ņŚÉ ņØśĒĢ┤ ņĮöĒīģ ļīĆņāü ĻĖ░ĒīÉĻ│╝ņØś ļ░Ćņ░® ņĀæĒĢ®ņØ┤ Ļ░ĆļŖźĒĢśļ»ĆļĪ£ ļō£ļĪŁ Ļ│ĄņĀĢ ņŗ£ ņĮöĒīģ ņÜ®ņĢĪņØ┤ ĻĖ░ĒīÉ ņāüņŚÉ ĒŹ╝ņ¦ĆļŖö ĒśäņāüņØä ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ļ░®ņ¦ĆĒĢĀ ņłś ņ׳ļŗż. ĻĘĖļ”╝ 2(b)ļŖö ņāüĻĖ░ ļ░®ļ▓ĢņØä ĒåĄĒĢ┤ ņĀ£ņ×æļÉ£ ņŖżĒŖĖļ”Į (strip) ĒśĢņāüņØś AgNW ņĀäļÅäņ▓┤ ĒÅŁ (width)ņØä ņĖĪņĀĢĒĢśĻ│Ā, ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ņāüņØś Ēī©Ēä┤ ĒÅŁĻ│╝ ļ╣äĻĄÉĒĢ£ Ļ▓░Ļ│╝ļź╝ ļ│┤ņŚ¼ņżĆļŗż. ņØ┤ ļĢī, ņä£ļĪ£ ļŗżļźĖ ĒÖĆ Ēī©Ēä┤ ĒÅŁņØä Ļ░¢ļŖö ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ 4Ļ░Ćņ¦Ć ļ¬©ļŹĖ (model)ņØś AgNW ņŖżĒŖĖļ”ĮņØä Ēī©Ēä░ļŗØĒĢśņśĆļŗż. ĻĘĖļ”╝ 2(b)ņŚÉņä£ ļ│╝ ņłś ņ׳ļŖö ļ░öņÖĆ Ļ░ÖņØ┤ Ēī©Ēä░ļŗØļÉ£ AgNW ņŖżĒŖĖļ”ĮņØĆ ļ¬©ļŹĖņŚÉ Ļ┤ĆĻ│äņŚåņØ┤ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ņāüņØś ĒÖĆĒī©Ēä┤ ļ│┤ļŗż ļŗżņåī ņ×æņØĆ ĒÅŁņØä ļ│┤ņśĆļŖöļŹ░, ņØ┤ļŖö ļō£ļĪŁ ņĮöĒīģņØä ĒĢśļŖö Ļ│╝ņĀĢņŚÉņä£ AgNW ņÜ®ņĢĪņØ┤ ņןļĀź (tension)ņØś ņśüĒ¢źņ£╝ļĪ£ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ĒÖĆ Ēī©Ēä┤ņØś Ļ░Ćņןņ×Éļ”¼ (edge) ņśüņŚŁĻ╣īņ¦Ć ņÖäļ▓ĮĒ׳ ņ▒äņÜ░ņ¦Ć ļ¬╗ĒĢ£ Ļ▓░Ļ│╝ļĪ£ ņé¼ļŻīļÉ£ļŗż. ĒĢśņ¦Ćļ¦ī ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ņŚÉ ĒśĢņä▒ļÉ£ ĒÖĆ Ēī©Ēä┤ņØś ĒÅŁĻ│╝ ņØ┤ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĻĖ░ĒīÉ ņāüņŚÉ ņĀ£ņ×æļÉ£ AgNW ņŖżĒŖĖļ”ĮņØś ĒÅŁņØĆ ņĄ£ļīĆ 5.8% ņØ┤ĒĢśņØś ņ×æņØĆ ĒÄĖņ░©ļź╝ ļ│┤ņ×äņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłņ£╝ļ®░, ņØ┤ļŖö ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀüņÜ®ĒĢ£ Ēģīņ×ÄĒśĢ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ļ░Å ļō£ļĪŁ ņĮöĒīģ ļ░®ļ▓ĢņØś Ļ▓░ĒĢ®ņØä ĒåĄĒĢ┤ ņä╝ņä£ Ļ│ĄņĀĢņØä ļŗ©ņł£ĒÖöĒĢśļ®┤ņä£ ļ╣äĻĄÉņĀü ņĀĢļ░ĆĒĢ£ ņĀäļÅäņä▒ ļéśļģĖļ¼╝ņ¦ł Ēī©Ēä┤ņØä ĒśĢņä▒ĒĢĀ ņłś ņ׳ņØīņØä ņØśļ»ĖĒĢ£ļŗż.
ĻĘĖļ”╝ 2(c)ļŖö Ēģīņ×ģĒśĢ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ĻĖ░ļ░ś ļō£ļĪŁ ņĮöĒīģ Ļ│ĄņĀĢņØä ļ░öĒāĢņ£╝ļĪ£ PI ĒĢäļ”ä ņāüņŚÉ Ēī©Ēä░ļŗØļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś ļööņ¦ĆĒäĖ ņØ┤ļ»Ėņ¦Ćļź╝ ļ│┤ņŚ¼ņżĆļŗż. 3Ļ░£ņØś ļŗ©ņ£ä ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØ┤ 120┬░ņØś ļō▒ Ļ░üļÅäļĪ£ ļ░░ņŚ┤ļÉśņ¢┤ ļĪ£ņĀ» ĻĄ¼ņä▒ņØä ņØ┤ļŻ©Ļ│Ā ņ׳ņ£╝ļ®░, insetņØś ņäżĻ│äļÉ£ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ņ║Éļō£ ļÅäļ®┤ņØä ļö░ļØ╝ ņĢłņĀĢņĀüņ£╝ļĪ£ Ēī©Ēä░ļŗØļÉśņŚłņØīņØä ļ│╝ ņłś ņ׳ļŗż. ļśÉĒĢ£, ĻĘĖļ”╝ 2(d)ņŚÉņä£ ļ│╝ ņłś ņ׳ļŖö ļ░öņÖĆ Ļ░ÖņØ┤ 3Ļ░£ņØś ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØĆ ņĄ£ņ┤ł Ēī©Ēä░ļŗØļÉ£ ĒśĢņāüņØä ņ£Āņ¦ĆĒĢśļ®┤ņä£ PDMS ĻĖ░ĒīÉņ£╝ļĪ£ ņĀäņé¼ļÉśņ¢┤ ņĢłņĀĢņĀüņØĖ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£Ļ░Ć ņĀ£ņ×æļÉśņŚłņØīņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņØ┤ļŖö ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ļÅäļäł ĒĢäļ”äņ£╝ļĪ£ ņé¼ņÜ®ļÉ£ PIĻ░Ć Ļ░¢ļŖö ļé«ņØĆ Ēæ£ļ®┤ņŚÉļäłņ¦Ć (surface energy)ļĪ£ ņØĖĒĢ┤ AgNW Ēī©Ēä┤Ļ│╝ņØś ņĀæņ░®ļĀźņØ┤ ņóŗņ¦Ć ļ¬╗ĒĢ£ ĒŖ╣ņä▒ņŚÉ ĻĖ░ņØĖĒĢ£ļŗż. ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ ņä╝ņä£ ņä▒ļŖź ĒÅēĻ░Ćļź╝ ņ£äĒĢ£ ņĀäņäĀ ņŚ░Ļ▓░ Ēøä PDMS ļ│┤ĒśĖņĖĄņØä ņĮöĒīģĒĢśņśĆļŗż. PDMS ļ│┤ĒśĖņĖĄņØĆ ņØ╝ņ░©ņĀüņ£╝ļĪ£ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä ņÖĖļČĆ ĒÖśĻ▓Įņ£╝ļĪ£ļČĆĒä░ ļ│┤ĒśĖĒĢśļ®░, ņØĆ ĒÄśņØ┤ņŖżĒŖĖļĪ£ ņŚ░Ļ▓░ļÉ£ ņĀäņäĀļōżņØä Ļ│ĀņĀĢĒĢśņŚ¼ ņä╝ņä£ ļÅÖņ×æņØś ņĢłņĀĢņä▒ņØä ĒÖĢļ│┤ĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢ£ļŗż. ļśÉĒĢ£, AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØ┤ ņŗĀņČĢņä▒ ĻĖ░ĒīÉ ļ¼╝ņ¦ł ņé¼ņØ┤ņŚÉ ņ£äņ╣śĒĢśļŖö ņāīļō£ņ£äņ╣ś (sandwich) ĻĄ¼ņĪ░ļź╝ ĻĄ¼ĒśäĒĢ©ņ£╝ļĪ£ņŹ© ļ░śļ│Ą ĻĄ¼ļÅÖņŚÉ ļö░ļØ╝ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ ņāüņŚÉ ņŚ░ņåŹņĀüņØĖ ņŻ╝ļ”ä (wrinkle) ĒśĢņāüņØś ļ░£ņāØņØä ļ¦ēņĢäņŻ╝ļŖö ņŚŁĒĢĀņØä ĒĢ£ļŗż.
ĻĘĖļ”╝ 3(a)ļŖö ņĀ£ņ×æļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ ĻĖ░ļ░ś ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ņØś ļööņ¦ĆĒäĖ ņØ┤ļ»Ėņ¦Ćļź╝ ļéśĒāĆļé┤ļ®░, ĻĖ░Ļ│äņĀüņ£╝ļĪ£ ņ£ĀņŚ░ĒĢ£ ĒŖ╣ņä▒ņØä ļ│┤ņŚ¼ņżĆļŗż. ĻĘĖļ”╝ 3(b)ļŖö ņĀ£ņ×æļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś Ēæ£ļ®┤ ĒśĢņāüņØä Ļ┤Ćņ░░ĒĢ£ SEM ņĖĪņĀĢ Ļ▓░Ļ│╝ļź╝ ļ│┤ņŚ¼ņŻ╝ļ®░, ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØĆ Ļ░Ćņןņ×Éļ”¼ ļČĆļČäņŚÉ Ļ▓ĮĻ│äņØś ļ¬©ĒśĖĒĢ©ņØ┤ ņŚåņØ┤ ļ╣äĻĄÉņĀü ņĀĢļ░ĆĒĢśĻ▓ī Ēī©Ēä░ļŗØļÉśņŚłņØīņØä ņĢī ņłś ņ׳ļŗż. ĻĘĖļ”╝ 3(c)ļŖö ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś ĒÖĢļīĆ SEM ņØ┤ļ»Ėņ¦Ćļź╝ ļéśĒāĆļé┤ļ®░, Ļ│Āļ░ĆļÅä (high density)ņØś AgNWĻ░Ć ņä£ļĪ£ ņłśļ¦ÄņØĆ ņĀæņ┤ē ņĀæņĀÉ (contact junction)ņØä ņ£Āņ¦ĆĒĢśļ®┤ņä£ ņĀäņ×ÉņØś ņØ┤ļÅÖņØä ņ£äĒĢ£ ĒåĄļĪ£ļź╝ ĒśĢņä▒ĒĢśĻ│Ā ņ׳ņØīņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņØ┤ļ¤¼ĒĢ£ Ļ▓░Ļ│╝ļĪ£ ņĀ£ņ×æļÉ£ ļŗ©ņ£ä ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØĆ ņĢĮ 5.6 ╬®ņØś ļé«ņØĆ ĒÅēĻĘĀ ņ┤łĻĖ░ ņĀĆĒĢŁ Ļ░ÆņØä ļ│┤ņśĆļŗż. ĒŖ╣Ē׳, Ļ│Āļ░ĆļÅä AgNW ļäżĒŖĖņøīĒü¼ ņĀäĻĘ╣ņØ┤ PDMS ĻĖ░ĒīÉņØś Ēæ£ļ®┤ ņśüņŚŁ ļé┤ļČĆņŚÉ ņĢłņĀĢņĀüņ£╝ļĪ£ ņ╣©Ēł¼ļÉśņ¢┤ AgNW/PDMS ļ│ĄĒĢ®ņ▓┤ļź╝ ĒśĢņä▒ĒĢśĻ│Ā ņ׳ņØīņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŖöļŹ░, ņØ┤ļŖö ņĀ£ņ×æļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØ┤ ņÖĖļĀźņŚÉ ļīĆĒĢ£ ļåÆņØĆ ĻĖ░Ļ│äņĀüņØĖ ņĢłņĀĢņä▒ņØä Ļ░Ćņ¦ł ņłś ņ׳ņØīņØä ņØśļ»ĖĒĢ£ļŗż.
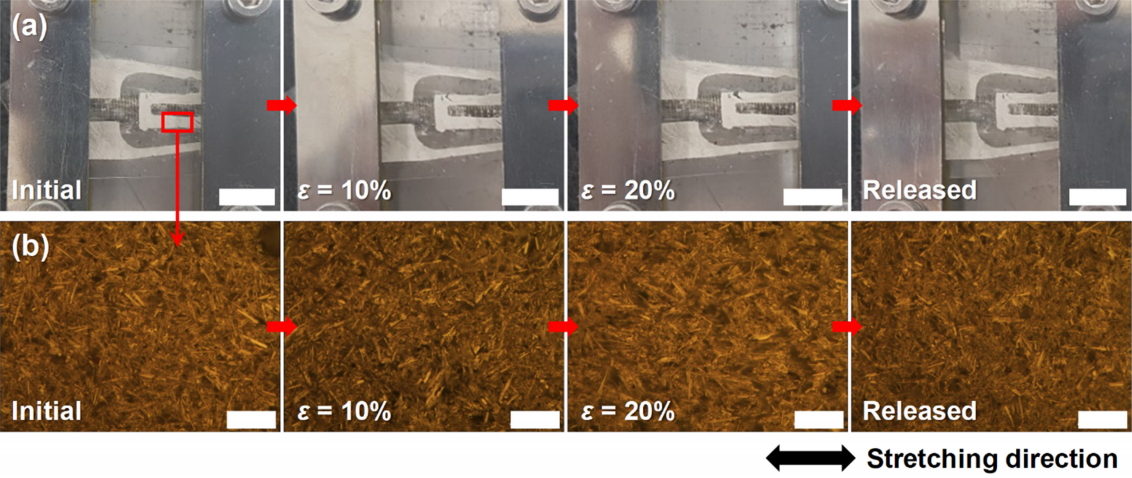
AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØĆ ņÖĖļČĆņŚÉņä£ Ļ░ĆĒĢ┤ņ¦ĆļŖö ĒלņŚÉ ļīĆĒĢ┤ ņĀäĻĘ╣ņØä ņØ┤ļŻ©ļŖö AgNW Ļ░ä ņĀæņ┤ē ņĀæņĀÉņØä ņĀÉņ¦äņĀüņ£╝ļĪ£ ņ×āņ¢┤ ņĀäļźś ĒåĄļĪ£Ļ░Ć ņżäņ¢┤ļōżĻ▓ī ļÉśĻ│Ā, Ļ▓░ĻĄŁ ņØ┤ņŚÉ ļö░ļØ╝ ņĀäĻĘ╣ņØś ņĀĆĒĢŁņØ┤ ņĀÉņ░©ņĀüņ£╝ļĪ£ ņ”ØĻ░ĆĒĢśļŖö ņøÉļ”¼ļĪ£ ņĢĢņĀĆĒĢŁņä▒ (piezoresistivity)ņØä ļØäĻ▓ī ļÉ£ļŗż. ņØ┤ļź╝ Ļ▓Ćņ”ØĒĢśĻĖ░ ņ£äĒĢ┤ ņĀ£ņ×æļÉ£ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä ņĀÉņ¦äņĀüņ£╝ļĪ£ ņØĖņןĒĢśļ®┤ņä£ AgNWņØś ļäżĒŖĖņøīĒü¼ ĒśĢņāü ļ│ĆĒÖöļź╝ Ļ┤Ćņ░░ĒĢśņśĆļŗż. ĻĘĖļ”╝ 4(a)ļŖö 10% Ļ░äĻ▓®ņ£╝ļĪ£ 20%Ļ╣īņ¦Ć ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖņŚÉ ļīĆĒĢ£ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś ĻĄ¼ņĪ░ ļ│ĆĒÖöļź╝ ļéśĒāĆļé┤ļŖö ļööņ¦ĆĒäĖ ņØ┤ļ»Ėņ¦ĆņØ┤ļ®░, ņØ┤ņŚÉ ļö░ļźĖ AgNW ļäżĒŖĖņøīĒü¼ņØś ĒśĢņāü ļ│ĆĒÖöļŖö ĻĘĖļ”╝ 4(b)ņØś OM ņØ┤ļ»Ėņ¦ĆņŚÉņä£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņ┤łĻĖ░ Ļ│Āļ░ĆļÅä AgNW ļäżĒŖĖņøīĒü¼ļŖö ņØĖĻ░ĆļÉśļŖö ņŖżĒŖĖļĀłņØĖņØ┤ ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ ņĀÉņ░© ņä▒Ļ▓©ņ¦Ćļ®░, 20% ņØĖņן ņŗ£ AgNW ļäżĒŖĖņøīĒü¼ ņāüņŚÉ ļ¼┤ņ×æņ£äņØś Ļ│ĄļÅÖ (void) ĒśĢņāüņØ┤ ĒśĢņä▒ļÉ©ņØä Ļ┤Ćņ░░ĒĢĀ ņłś ņ׳ņŚłļŗż. ņØ┤ļŖö ņÖĖļČĆņŚÉņä£ ņØĖĻ░ĆļÉśļŖö ņŖżĒŖĖļĀłņØĖņŚÉ ļö░ļØ╝ AgNW ļ▓łļōż (bundle) Ļ░ä Ļ░äĻ▓®ņØ┤ ļ®Ćņ¢┤ņ¦ÉņØä ņØśļ»ĖĒĢśļ®░, Ļ▓░ĻĄŁ ņØ┤ņŚÉ ļö░ļØ╝ ņĀäĻĘ╣ņØś ņĀĆĒĢŁņØĆ ņĀÉņ░© ņ”ØĻ░ĆĒĢśĻ▓ī ļÉ©ņØä ņśłņĖĪĒĢĀ ņłś ņ׳ļŗż. ļśÉĒĢ£, ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖņØä ļ¬©ļæÉ ņĀ£Ļ▒░Ē¢łņØä ļĢī ļäżĒŖĖņøīĒü¼ ĒśĢņāüņØĆ ņ┤łĻĖ░ņØś Ļ│Āļ░ĆļÅä ņāüĒā£ļĪ£ ĒÜīļ│ĄļÉ©ņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŖöļŹ░, ņØ┤ļŖö AgNW ņé¼ņØ┤ņØś ļ╣ł Ļ│ĄĻ░äņØä ņ▒äņÜ┤ PDMSņØś Ēāäņä▒ņŚÉ ņØśĒĢ£ ļ│ĄņøÉ (restoration) ĒŖ╣ņä▒ņØś Ļ▓░Ļ│╝ļĪ£ ņé¼ļŻīļÉśļ®░, ņä╝ņä£Ļ░Ć ĒŖ╣ņä▒ņØś Ļ░ĆņŚŁņä▒ (reversibility)ņØä Ļ░Ćņ¦ł ņłś ņ׳ņØīņØä ņØśļ»ĖĒĢ£ļŗż.
ĻĘĖļ”╝ 5(a)ļŖö 20%Ļ╣īņ¦Ć Ļ░ĆĒĢ┤ņ¦ĆļŖö ņŖżĒŖĖļĀłņØĖņØś ņ”ØĻ░Ć ļö░ļźĖ AgNW ņĢĢņĀĆĒĢŁ ņä╝ņä£ņØś ņĀĆĒĢŁ ļ│ĆĒÖö ĒŖ╣ņä▒ņØä ļéśĒāĆļéĖļŗż. ņÖĖļČĆņŚÉņä£ ņØĖĻ░ĆĒĢ£ ņŖżĒŖĖļĀłņØĖņØ┤ ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ ņä╝ņä£ņØś ņĀĆĒĢŁņØ┤ ņĀÉņ¦äņĀüņ£╝ļĪ£ ņ”ØĻ░ĆĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņ£╝ļ®░, ņØ┤ļŖö ĻĘĖļ”╝ 4(b)ņŚÉņä£ ĒÖĢņØĖĒĢ£ ļ░öņÖĆ Ļ░ÖņØ┤ ņÖĖļĀź ņØĖĻ░ĆņŚÉ ņØśĒĢ┤ AgNW ļäżĒŖĖņøīĒü¼ ļé┤ AgNW Ļ░ä ņĀæņ┤ēĒĢśļŖö ņĀæņĀÉņØś ņłśĻ░Ć ņĀÉņ¦äņĀüņ£╝ļĪ£ Ļ░ÉņåīĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż. ņĢĢņĀĆĒĢŁ ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ņØś ļ»╝Ļ░ÉļÅä (sensitivity)ļŖö Ļ▓īņØ┤ņ¦Ćņ£© (gauge factor, GF = (╬öR/R0)/╬Ą)ļĪ£ ĒÅēĻ░ĆļÉĀ ņłś ņ׳ņ£╝ļ®░, ņØ┤ļŖö ĻĘĖļ”╝ 5(a) ĻĘĖļלĒöäņØś ĻĖ░ņÜĖĻĖ░ (slope)ļź╝ ņØśļ»ĖĒĢ£ļŗż. ĻĘĖļ”╝ 5(a) ĻĘĖļלĒöäļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņäĀĒśĢ Ēö╝Ēīģ (linear fitting)ņØä ĒåĄĒĢ┤ ĻĖ░ņÜĖĻĖ░ļź╝ Ļ│äņé░ĒĢ£ Ļ▓░Ļ│╝ ņĀ£ņ×æļÉ£ ņä╝ņä£ņØś GFļŖö 20%ņØś ņØĖņן ļ▓öņ£äņŚÉ ļīĆĒĢ┤ņä£ ņĢĮ 5.3ņ×äņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ļśÉĒĢ£, ņĀ£ņ×æļÉ£ ņä╝ņä£ņØś ņØæļŗĄ ĒŖ╣ņä▒ņØ┤ ņÜ░ņłśĒĢ£ ņäĀĒśĢņä▒ (linearity, r2 Ōēł 0.996)ņØä ļéśĒāĆļāäņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłļŖöļŹ░, ņØ┤ļŖö PDMS ļ¦żĒŖĖļ”ŁņŖż (matrix) ļé┤ņŚÉ Ļ▓¼Ļ│ĀĒĢśĻ▓ī ņ╣©Ēł¼ļÉ£ ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØś ĻĄ¼ņĪ░ņĀü ņĢłņĀĢņä▒ņ£╝ļĪ£ ņØĖĒĢ┤ 20%Ļ╣īņ¦ĆņØś ņØĖņןņŚÉ ļīĆĒĢ┤ AgNW ļäżĒŖĖņøīĒü¼ņŚÉ ļ╣äņäĀĒśĢņĀüņØĖ ĻĘ╣ņŗ¼ĒĢ£ ļ│ĆĒśĢņØ┤ ļ░£ņāØļÉśņ¦Ć ņĢŖĻĖ░ ļĢīļ¼ĖņØĖ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż. ĻĖ░ņĪ┤ņŚÉ ņé░ņŚģņĀüņ£╝ļĪ£ Ļ░Ćņן ĒÖ£ļ░£Ē׳ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŖö ĻĖłņåŹ ĒżņØ╝ ĻĖ░ļ░ś ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ņØś GFņÖĆ ņŗĀņČĢņä▒ņØ┤ Ļ░üĻ░ü ņĢĮ 2ņÖĆ 5% ņĀĢļÅäļĪ£ ņĀ£ĒĢ£ļÉśļŖö Ļ▓āņØä Ļ░ÉņĢłĒĢĀ ļĢī [4], ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ĻĄ¼ĒśäĒĢ£ AgNW ņĢĢņĀĆĒĢŁ ņä╝ņä£ļŖö Ļ░£ņäĀļÉ£ ļ»╝Ļ░ÉļÅäņÖĆ ņŖżĒŖĖļĀłņØĖ Ļ░Éņ¦Ć ļ▓öņ£ä ĒŖ╣ņä▒ņØä ļ│┤ņ×äĻ│╝ ļÅÖņŗ£ņŚÉ ņÜ░ņłśĒĢ£ ņäĀĒśĢņä▒ņØä ĒÖĢļ│┤ĒĢĀ ņłś ņ׳ņ¢┤ ļåÆņØĆ ņØæņÜ®ņä▒ņØä Ļ░Ćņ¦ÉņØä ņĢī ņłś ņ׳ļŗż.
ĻĘĖļ”╝ 5(b)ļŖö ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖņØä ņĀÉņ░© ņżäņØ╝ Ļ▓ĮņÜ░ ņĖĪņĀĢļÉ£ ņŖżĒŖĖļĀłņØĖ ļīĆļ╣ä ņä╝ņä£ņØś ņĀĆĒĢŁ ļ│ĆĒÖöļź╝ ļéśĒāĆļéĖļŗż. ĻĘĖļ”╝ 5(b)ņŚÉņä£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŖö ļ░öņÖĆ Ļ░ÖņØ┤ ņŖżĒŖĖļĀłņØĖ ņ”ØĻ░Ć ņŗ£ņØś Ļ▓ĮĒ¢źĻ│╝ Ēü░ ĒÄĖņ░©ļź╝ ļéśĒāĆļé┤ņ¦Ć ņĢŖņĢä ļ╣äĻĄÉņĀü ļé«ņØĆ ņØ┤ļĀź ĒŖ╣ņä▒ (hysteresis)ņØä ļ│┤ņ×äņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż. ņØ┤ļŖö PDMS ļ¦żĒŖĖļ”ŁņŖż ļé┤ņŚÉ Ļ▓¼Ļ│ĀĒĢśĻ▓ī ņåŹļ░ĢļÉśņ¢┤ ņ׳ņ¢┤ AgNW ļäżĒŖĖņøīĒü¼ņØś ĒśĢĒā£ĒĢÖņĀüņØĖ ļ│ĆĒÖö (morphological change)Ļ░Ć ņŻ╝ļĪ£ ņÖĖļĀźņØś ņØĖĻ░Ć ļ░Å ņĀ£Ļ▒░ņŚÉ ļö░ļźĖ PDMSņØś ļ¼╝ļ”¼ņĀüņØĖ Ļ▒░ļÅÖņŚÉ ņØśņĪ┤ĒĢśņŚ¼ Ļ▓░ņĀĢļÉśĻĖ░ ļĢīļ¼ĖņØĖ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż. ņÖĖļČĆņŚÉņä£ ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖņØ┤ ņÖäļ▓ĮĒ׳ ņĀ£Ļ▒░ļÉśņŚłņØä ļĢī ņä╝ņä£ņØś ļ│ĄĻĘĆ ņĀĆĒĢŁņØĆ ņ┤łĻĖ░ ņāüĒā£ ļīĆļ╣ä ņĢĮ 8.9% ņ”ØĻ░ĆĒĢ£ Ļ▓ĮĒ¢źņØä ļ│╝ ņłś ņ׳ņŚłļŖöļŹ░, ņØ┤ļŖö ĻĖ░ĒīÉņ£╝ļĪ£ ņĀüņÜ®ļÉ£ PDMSņØś ņĀÉĒāäņä▒ (viscoelastic) ņä▒ņ¦łņŚÉ ĻĖ░ņØĖĒĢ£ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż [12]. ĒĢśņ¦Ćļ¦ī ņÖĖļĀź ņĀ£Ļ▒░ Ēøä ņØ╝ņĀĢ ņŗ£Ļ░äņØ┤ ņ¦ĆļéĀ Ļ▓ĮņÜ░ ņä╝ņä£ļŖö ņ┤łĻĖ░ ĒŖ╣ņä▒ņ£╝ļĪ£ ļ│ĄĻĘĆļÉ©ņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłļŖöļŹ░, ņØ┤ļŖö ņä╝ņä£ņØś ņØæļŗĄ ĒŖ╣ņä▒ņØ┤ ļ╣äĻĄÉņĀü Ļ░ĆņŚŁņĀüņ×äņØä ņØśļ»ĖĒĢ£ļŗż. ņØ┤ļŖö ĻĘĖļ”╝ 4(b)ņŚÉņä£ ĒÖĢņØĖĒĢ£ ļ░öņÖĆ Ļ░ÖņØ┤ ņÖĖļČĆņŚÉņä£ ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖņØ┤ ņÖäļ▓ĮĒ׳ ņĀ£Ļ▒░ļÉśņŚłņØä ļĢī AgNW ļäżĒŖĖņøīĒü¼ ĒśĢņāüņØ┤ ņ┤łĻĖ░ ņāüĒā£ļĪ£ ļ│ĄņøÉļÉ£ Ļ▓░Ļ│╝ņÖĆ ņØ╝ņ╣śĒĢśļŖö Ļ▓ĮĒ¢źņØ┤ļŗż.
ņØ┤ļ¤¼ĒĢ£ ņØ┤ņ£ĀļĪ£ ĻĘĖļ”╝ 5(c)ņŚÉņä£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŖö ļ░öņÖĆ Ļ░ÖņØ┤ ņĀ£ņ×æļÉ£ AgNW ņä╝ņä£ļŖö ņłś ņ░©ļĪĆņØś ļ░śļ│ĄņĀüņØĖ ņŖżĒŖĖļĀłņØĖņØś ņØĖĻ░Ć (20%) ļ░Å ņĀ£Ļ▒░ņŚÉ ļīĆĒĢ┤ņä£ļÅä ļ╣äĻĄÉņĀü ņĢłņĀĢņĀüņØ┤Ļ│Ā Ļ░ĆņŚŁņĀüņØĖ ņØæļŗĄ ĒŖ╣ņä▒ņØä ļ│┤ņØ┤ļŖö Ļ▓āņ£╝ļĪ£ ņé¼ļŻīļÉ£ļŗż.
ņŗżņĀ£ņĀüņØĖ ņØæņÜ®ņØś Ļ┤ĆņĀÉņŚÉņä£ ļ│╝ ļĢī, ņÜ░ņłśĒĢ£ ļ»╝Ļ░ÉļÅä ļ░Å ļäōņØĆ Ļ░Éņ¦Ć ļ▓öņ£äņÖĆ ļŹöļČłņ¢┤ ņןĻĖ░ņĀüņØĖ ļÅÖņ×æņØś ņĢłņĀĢņä▒ (long-term stability) ļśÉĒĢ£ ņŗĀņČĢņä▒ ņä╝ņä£Ļ░Ć ļ¦īņĪ▒ņŗ£ņ╝£ņĢ╝ ĒĢśļŖö ņżæņÜöĒĢ£ ņÜöĻĄ¼ ņĪ░Ļ▒┤ņØ┤ļŗż. ņØ┤ļź╝ ĒÖĢņØĖĒĢśĻĖ░ ņ£äĒĢ┤ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņĀ£ņ×æļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņä╝ņä£ņŚÉ ņĄ£ļīĆ 20%ņØś ņŖżĒŖĖļĀłņØĖņØä 1000 ĒÜī ļ░śļ│ĄņĀüņ£╝ļĪ£ ņØĖĻ░Ć/ņĀ£Ļ▒░ĒĢśļ®┤ņä£ ĻĘĖ ņØæļŗĄ ĒŖ╣ņä▒ņØä Ļ┤Ćņ░░ĒĢśņśĆļŗż. ĻĘĖļ”╝ 5(d)ļŖö 1000 ĒÜīņØś ļ░śļ│Ą ĻĄ¼ļÅÖ ņżæ 100 ĒÜī ļ¦łļŗż ņĖĪņĀĢļÉ£ ņä╝ņä£ņØś ņØæļŗĄ ĒŖ╣ņä▒ņØä ļéśĒāĆļé┤ļ®░, Ļ░ü ĒīīĒśĢņØ┤ Ēü░ ĒÄĖņ░©ņŚåņØ┤ ņä£ļĪ£ Ļ▓╣ņ│Éņ¦ÉņØä ļ│╝ ņłś ņ׳ļŗż. ĻĘĖļ”╝ 5(e)ņÖĆ 5(f)ļŖö Ļ░üĻ░ü ĻĘĖļ”╝ 5(d)ņØś Ļ▓░Ļ│╝ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņäĀĒśĢ Ēö╝ĒīģņØä ĒåĄĒĢ┤ Ļ│äņé░ļÉ£ ĻĖ░ņÜĖĻĖ░ (GF)ņÖĆ r2 Ļ░ÆņØä ļéśĒāĆļéĖļŗż. 100 ĒÜī ļ¦łļŗż ņĖĪņĀĢļÉ£ GFļŖö ļ░śļ│Ą ĻĄ¼ļÅÖņŚÉ ļö░ļØ╝ ļŗ©ņĪ░ (monotonic) ņ”ØĻ░Ć ļ░Å Ļ░ÉņåīņØś Ļ▓ĮĒ¢źņØä ļéśĒāĆļé┤ņ¦Ć ņĢŖņĢśņ£╝ļ®░ (ĻĘĖļ”╝ 5(e)), Ļ░ü ĒīīĒśĢņØś r2 Ļ░Æ ļśÉĒĢ£ ņ┤łĻĖ░ ņāüĒā£ Ļ░Æ ļīĆļ╣ä Ēü░ ĒÄĖņ░©ļź╝ ļéśĒāĆļé┤ņ¦Ć ņĢŖņØīņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż (ĻĘĖļ”╝ 5(f)). ņØ┤ļŖö ļ░śļ│Ą ĻĄ¼ļÅÖ ĒÖśĻ▓Į ĒĢśņŚÉņä£ļÅä ņĀ£ņ×æļÉ£ ņä╝ņä£ņØś ņØæļŗĄ ĒŖ╣ņä▒ņØ┤ ļ╣äĻĄÉņĀü ņÜ░ņłśĒĢ£ ņĢłņĀĢņä▒ ļ░Å ņäĀĒśĢņä▒ņØä ņ£Āņ¦ĆĒĢĀ ņłś ņ׳ņØīņØä ņØśļ»ĖĒĢśļ®░, AgNW/PDMS ļ│ĄĒĢ®ņ▓┤ņØś ĻĄ¼ņĪ░ņĀüņØĖ ņĢłņĀĢņä▒ņŚÉ ĻĖ░ņØĖĒĢśļŖö Ļ▓░Ļ│╝ļØ╝Ļ│Ā ļ│╝ ņłś ņ׳ļŗż.
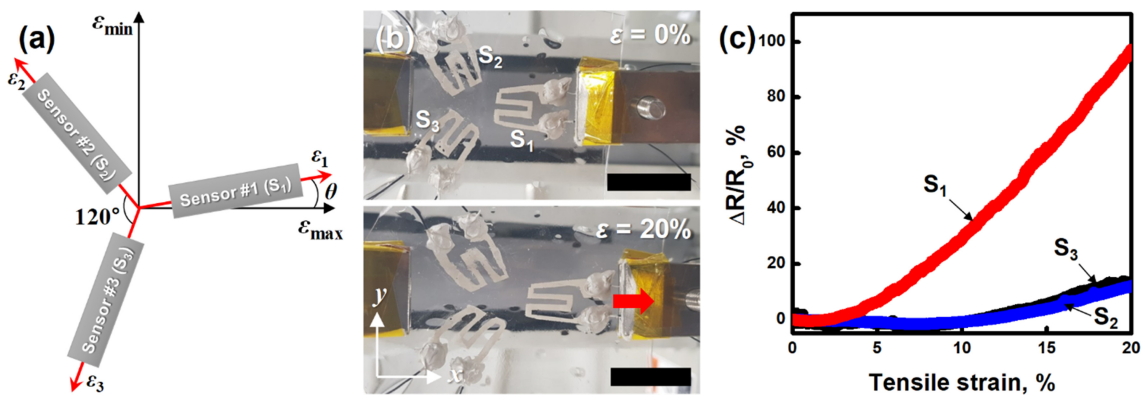
ĻĘĖļ”╝ 6(a)ļŖö ņŻ╝ ņŖżĒŖĖļĀłņØĖņØś ļ░®Ē¢źņØä ļéśĒāĆļé┤ļŖö ļĪ£ņĀ» ņä╝ņä£ ĻĄ¼ņä▒ņØś ļ¬©ņŗØļÅäņØ┤ļŗż. ņŚ¼ĻĖ░ņä£ ╬Ąmax ņÖĆ ╬ĄminņØĆ Ļ░üĻ░ü ņĄ£ļīĆ ļ░Å ņĄ£ņåī ņŻ╝ ņŖżĒŖĖļĀłņØĖņØä ņØśļ»ĖĒĢ£ļŗż. Ļ░üĻ░ü S1, S2 ļ░Å S3ļĪ£ Ēæ£ĻĖ░ļÉ£ 3Ļ░£ņØś ļÅÖņØ╝ĒĢ£ ļŗ©ņ£ä AgNW ņä╝ņä£Ļ░Ć 120┬░ņØś ĻĄÉņ░© Ļ░üļÅäļź╝ Ļ░Ćņ¦ĆĻ│Ā ļ░░ņŚ┤ļÉśļ®░, Ļ░ü ļŗ©ņ£ä ņä╝ņä£ņØś ņŖżĒŖĖļĀłņØĖ Ļ░ÆņØĆ S1, S2 ļ░Å S3ņŚÉ ļīĆĒĢ┤ Ļ░üĻ░ü ╬Ą1, ╬Ą2 ļ░Å ╬Ą3ļĪ£ Ēæ£ĻĖ░ĒĢśņśĆļŗż.
ļĪ£ņĀ» ĻĄ¼ņä▒ ļé┤ ĻĖ░ņżĆ ņä╝ņä£ (S1)Ļ░Ć ņŻ╝ ņŖżĒŖĖļĀłņØĖņØś ļ░®Ē¢źņŚÉ ļīĆĒĢ┤ ╬ĖņØś Ļ░üļÅäņŚÉ ļ¦×ņČ░ņĀĖ ņ׳ļŗżĻ│Ā Ļ░ĆņĀĢĒĢśļ®┤, ╬Ą1, ╬Ą2 ļ░Å ╬Ą3ļŖö ļ¬©ņ¢┤ ņøÉ (MohrŌĆÖs circle)ņ£╝ļĪ£ ņĢīļĀżņ¦ä ņŖżĒŖĖļĀłņØĖ ļ│ĆĒÖś Ļ┤ĆĻ│äņŚÉ ņØśĒĢ┤ņä£ ņĢäļל ņŗØĻ│╝ Ļ░ÖņØ┤ ╬Ąmax, ╬Ąmin ļ░Å ╬ĖņŚÉ ļīĆĒĢ┤ņä£ ņĀĢļ”¼ĒĢĀ ņłś ņ׳ļŗż [7,12,14].
ņŚ¼ĻĖ░ņä£ ╬Ą1, ╬Ą2 ļ░Å ╬Ą3ļŖö ņŗżĒŚśņĀüņ£╝ļĪ£ Ļ▓░ņĀĢļÉĀ ņłś ņ׳ļŖö Ļ░ÆņØ┤ļ»ĆļĪ£ ņāüĻĖ░ ņŗØ (1)ŌłÆ(3)ņØä ļŗżņŗ£ ņĀĢļ”¼ĒĢśļ®┤, ņĢäļל ņŗØĻ│╝ Ļ░ÖņØ┤ ╬Ąmax, ╬Ąmin ļ░Å ╬Ėļź╝ ╬Ą1, ╬Ą2 ļ░Å ╬Ą3ņŚÉ ļīĆĒĢ┤ņä£ ļéśĒāĆļé╝ ņłś ņ׳ļŗż.
ņŗØ (4)ŌłÆ(6)ņØä ņØ┤ņÜ®ĒĢśļ®┤ ņ×äņØśņØś ņÖĖļĀźņŚÉ ļīĆĒĢ┤ ņŻ╝ ņŖżĒŖĖļĀłņØĖņØś Ēü¼ĻĖ░ņÖĆ ļ░®Ē¢źņØä ļÅÖņŗ£ņŚÉ ņĢīņĢäļé╝ ņłś ņ׳Ļ▓ī ļÉ£ļŗż.
ĻĘĖļ”╝ 6(b)ļŖö ņ┤łĻĖ░ ļ░Å S1ņØ┤ ļ░░ņŚ┤ļÉ£ ļ░®Ē¢źņ£╝ļĪ£ 20%ņØś ņŖżĒŖĖļĀłņØĖņØ┤ ņØĖĻ░ĆļÉ£ Ļ▓ĮņÜ░ AgNW ļĪ£ņĀ» ņä╝ņä£ņØś ļööņ¦ĆĒäĖ ņØ┤ļ»Ėņ¦Ćļź╝ ļ│┤ņŚ¼ņżĆļŗż. xņČĢ ļ░®Ē¢źņ£╝ļĪ£ 20% ņŖżĒŖĖļĀłņØĖņØ┤ ņØĖĻ░ĆļÉĀ ļĢī, xņČĢņŚÉ ļ░░ņŚ┤ļÉ£ S1ņØś Ļ▓ĮņÜ░ ĻĄ¼ļČłĻĄ¼ļČłĒĢ£ (serpentine) ĻĄ¼ņĪ░Ļ░Ć ĻĖĖņØ┤ ļ░®Ē¢źņ£╝ļĪ£ ļŖśņ¢┤ļéśļŖö ĒśĢĒā£ņØś ļ│ĆĒśĢņØ┤ ļ░£ņāØļÉśļ®░, ļÅÖņŗ£ņŚÉ S2ņÖĆ S3ņØś Ļ▓ĮņÜ░ ĻĄ¼ļČłĻĄ¼ļČłĒĢ£ ĻĄ¼ņĪ░Ļ░Ć ĒÄ╝ņ│Éņ¦ĆļŖö ĒśĢņāüņØä ļéśĒāĆļāäņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
ĻĘĖļ”╝ 6(c)ļŖö ĻĘĖļ”╝ 6(b)ņØś ņÖĖļČĆ ņŖżĒŖĖļĀłņØĖ ņØĖĻ░Ć ņĪ░Ļ▒┤ ĒĢśņŚÉ ņĖĪņĀĢļÉ£ Ļ░ü ļŗ©ņ£ä AgNW ņä╝ņä£ņØś ņĀĆĒĢŁ ļ│ĆĒÖöņ£©ņØä ļéśĒāĆļéĖļŗż. ĻĘĖļ”╝ 6(b)ņŚÉņä£ ĒÖĢņØĖĒĢ£ ļ░öņÖĆ Ļ░ÖņØ┤ xņČĢ ļ░®Ē¢źņ£╝ļĪ£ ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖņŚÉ ļīĆĒĢ┤ņä£ S1ņØ┤ Ļ░Ćņן Ēü░ ņĀĆĒĢŁ ļ│ĆĒÖöņ£©ņØä ļ│┤ņśĆņ£╝ļ®░, ņØ┤ļŖö ņä╝ņä£ ĻĄ¼ņĪ░Ļ░Ć ĻĖĖņØ┤ ļ░®Ē¢źņ£╝ļĪ£ ļŖśņ¢┤ļéśļ®┤ņä£ ļé┤ļČĆ AgNW ļäżĒŖĖņøīĒü¼ņŚÉ ļ╣äĻĄÉņĀü Ēü░ ļ│ĆĒśĢņØä ņ£ĀļÅäĒ¢łĻĖ░ ļĢīļ¼ĖņØĖ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż. ļ░śļ®┤, S2ņÖĆ S3ņØś Ļ▓ĮņÜ░ ņÖĖļĀźņØ┤ ņØĖĻ░ĆļÉ£ ņČĢņŚÉ ļīĆĒĢ┤ 120┬░ņØś ĻĄÉņ░© Ļ░üļÅäļź╝ Ļ░ĆņĀĖ ĻĄ¼ļČłĻĄ¼ļČłĒĢ£ ņä╝ņä£ ĻĄ¼ņĪ░Ļ░Ć ĒÄ╝ņ│Éņ¦ĆļŖö ļ│ĆĒśĢņØä Ļ▓¬Ļ▓ī ļÉśļ»ĆļĪ£ ļé┤ļČĆ AgNW ļäżĒŖĖņøīĒü¼ņØś ĒśĢņāü ļ│ĆĒÖöļŖö ņāüļīĆņĀüņ£╝ļĪ£ ņĀüĻ▓ī ļÉśĻ│Ā, Ļ▓░ĻĄŁ ļÅÖņØ╝ĒĢ£ Ēü¼ĻĖ░ņØś ņÖĖļĀźņŚÉ ļīĆĒĢ┤ņä£ļÅä S1ņŚÉ ļ╣äĒĢ┤ ļ»Ėļ»ĖĒĢ£ ņĀĆĒĢŁ ļ│ĆĒÖöņ£©ņØä ļéśĒāĆļéĖļŗż. ļśÉĒĢ£, S2ņÖĆ S3ļŖö ņÖĖļČĆ ņŖżĒŖĖļĀłņØĖņØ┤ ņØĖĻ░ĆļÉ£ ņČĢņŚÉ ļīĆĒĢ┤ ļīĆņ╣ŁņĀüņ£╝ļĪ£ ņ£äņ╣śĒĢśļ»ĆļĪ£ ņä£ļĪ£ ņ£Āņé¼ĒĢ£ ņØæļŗĄ ĒŖ╣ņä▒ņØä ļ│┤ņ×äņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
ņÖĖļČĆņŚÉņä£ 20%ņØś ņŖżĒŖĖļĀłņØĖņØ┤ ņØĖĻ░ĆļÉ£ Ļ▓ĮņÜ░ ĻĘĖļ”╝ 6(c)ņØś ņĖĪņĀĢ Ļ▓░Ļ│╝ļĪ£ļČĆĒä░ ņ¢╗ņ¢┤ņ¦ä ╬Ą1, ╬Ą2 ļ░Å ╬Ą3ļŖö Ļ░üĻ░ü 18.9%, 2.4% ļ░Å 2.6%ņśĆļŗż. ņØ┤ļĀćĻ▓ī ņŗżĒŚśņĀüņ£╝ļĪ£ ņ¢╗ņ¢┤ņ¦ä ╬Ą1, ╬Ą2 ļ░Å ╬Ą3ņØś Ļ░ÆņØä ņŗØ (4)ŌłÆ(6)ņŚÉ ļīĆņ×ģĒĢśņŚ¼ Ļ│äņé░ļÉ£ ╬Ąmax, ╬Ąmin ļ░Å ╬ĖļŖö Ļ░üĻ░ü ņĢĮ 18.9%, ŌłÆ3% ļ░Å ŌłÆ0.007┬░ņśĆļŗż. Ļ│äņé░ļÉ£ ╬Ąmax ļ░Å ╬ĖļŖö ņŗżņĀ£ ņÖĖļČĆņŚÉņä£ ņØĖĻ░ĆļÉ£ ņŖżĒŖĖļĀłņØĖ Ēü¼ĻĖ░ (20%) ļ░Å ļ░®Ē¢ź (0┬░)Ļ│╝ Ēü░ ņśżņ░©ņŚåņØ┤ ņל ļōżņ¢┤ļ¦×ļŖö Ļ▓░Ļ│╝ļź╝ ļ│┤ņśĆļŗż. ņØ┤ļŖö ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņĢłĒĢśļŖö AgNW ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£Ļ░Ć ņ×äņØśņØś ņÖĖļĀźņŚÉ ļīĆĒĢ┤ ņŻ╝ ņŖżĒŖĖļĀłņØĖĻ│╝ ļ░®Ē¢źņØä ņĀĢĒÖĢĒĢśĻ▓ī Ļ░Éņ¦ĆĒĢĀ ņłś ņ׳ņØīņØä ņØśļ»ĖĒĢśļ®░, Ē¢źĒøä ļŗżņ¢æĒĢ£ ņØæņÜ® ļČäņĢ╝ņŚÉņä£ ļŗżņČĢ ņä╝ņä£ļĪ£ņØś ĒÖ£ņÜ® Ļ░ĆļŖźņä▒ņØ┤ ļåÆņØä Ļ▓āņ£╝ļĪ£ ĻĖ░ļīĆļÉ£ļŗż.
4. Ļ▓░ ļĪĀ
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä ņØ┤ņÜ®ĒĢ£ ņŗĀņČĢņä▒ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļź╝ ņĀ£ņĢłĒĢśņśĆļŗż. Ēģīņ×ÄĒśĢ ņäĆļÅäņÜ░ ļ¦łņŖżĒü¼ ļ░Å ļō£ļĪŁ ņĮöĒīģ ĻĖ░ņłĀņØä Ļ▓░ĒĢ®ĒĢ£ ņÜ®ņĢĪ Ļ│ĄņĀĢņØä ĻĖ░ļ░śņ£╝ļĪ£ AgNW ļäżĒŖĖņøīĒü¼ ņĀäĻĘ╣ņØä ļ╣äĻĄÉņĀü ņĀĢļ░ĆĒĢśĻ▓ī Ēī©Ēä░ļŗØĒĢĀ ņłś ņ׳ņŚłņ£╝ļ®░, ņØ┤ļź╝ ņŗĀņČĢņä▒ ĻĖ░ĒīÉņŚÉ ņ╣©Ēł¼ ņĀäņé¼ņŗ£ĒéżļŖö Ļ░äļŗ©ĒĢ£ Ļ│╝ņĀĢņØä ĒåĄĒĢ┤ ņŗĀņČĢņä▒ ļĪ£ņĀ» ņä╝ņä£ļź╝ ņä▒Ļ│ĄņĀüņ£╝ļĪ£ ĻĄ¼ĒśäĒĢśņśĆļŗż. ĒśĢņāü Ļ┤Ćņ░░ Ļ▓░Ļ│╝ AgNW ļäżĒŖĖņøīĒü¼Ļ░Ć ĒÅ┤ļ”¼ļ©Ė ļ¦żĒŖĖļ”ŁņŖż ļé┤ņŚÉ ņĢłņĀĢņĀüņ£╝ļĪ£ ĒśĢņä▒ļÉśņŚłņØīņØä ĒÖĢņØĖĒĢśņśĆļŗż. ņĀ£ņ×æļÉ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØĆ ļ╣äĻĄÉņĀü ļåÆņØĆ ļ»╝Ļ░ÉļÅä (GF > 5), ļäōņØĆ Ļ░Éņ¦Ć ļ▓öņ£ä (20%), ļé«ņØĆ ņØ┤ļĀź ĒŖ╣ņä▒ ļ░Å ļåÆņØĆ ņäĀĒśĢņä▒ ļō▒ ņÜ░ņłśĒĢ£ ņä▒ļŖźņØä ļéśĒāĆļāłņ£╝ļ®░, 1000 ĒÜīņØś ļ░śļ│ĄņĀüņØĖ ņØĖņן-ņØ┤ņÖäņŚÉ ļīĆĒĢ┤ņä£ļÅä ņĢłņĀĢņĀüņØ┤Ļ│Ā Ļ░ĆņŚŁņĀüņØĖ ņĢĢņĀĆĒĢŁ ĒŖ╣ņä▒ņØä ļ│┤ņśĆļŗż. ļśÉĒĢ£, 3Ļ░£ņØś ļÅÖņØ╝ĒĢ£ AgNW ņĢĢņĀĆĒĢŁ ņĀäĻĘ╣ņØä 120┬░ Ļ░äĻ▓®ņ£╝ļĪ£ ļ░░ņŚ┤ĒĢ£ ļĪ£ņĀ» ņä╝ņä£ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņŻ╝ ņŖżĒŖĖļĀłņØĖņØś Ēü¼ĻĖ░ņÖĆ ļ░®Ē¢źņØä ļ╣äĻĄÉņĀü ņĀĢļ░ĆĒĢśĻ▓ī ņĖĪņĀĢĒĢĀ ņłś ņ׳ņŚłļŗż. ņØ┤ļŖö ĒŖ╣ņĀĢĒĢ£ ĒĢśļéśņØś ņČĢņŚÉ ļīĆĒĢ┤ņä£ļ¦ī ņŖżĒŖĖļĀłņØĖ Ļ░Éņ¦ĆĻ░Ć Ļ░ĆļŖźĒĢ£ ļŗ©ņČĢ ņä╝ņä£ņØś ĒĢ£Ļ│äļź╝ ĻĘ╣ļ│ĄĒĢ£ Ļ▓░Ļ│╝ņØ┤ļ®░, Ļ░äļŗ©ĒĢśĻ│Ā ņĀĢļ░ĆĒĢ£ ņĀ£ņ×æ Ļ│ĄņĀĢņØś ĒŖ╣ņä▒ ņāü ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ ņĀ£ņĢłĒĢśļŖö ņŗĀņČĢņä▒ ļĪ£ņĀ» ņŖżĒŖĖļĀłņØĖ ņä╝ņä£ļŖö Ē¢źĒøä ņŖżļ¦łĒŖĖ ĒŚ¼ņŖżņ╝Ćņ¢┤ (smart healthcare) ļČäņĢ╝ņØś ĒĢĄņŗ¼ ĻĖ░ņłĀļĪ£ ĒÖ£ņÜ®ļÉĀ ņłś ņ׳ļŖö Ļ░ĆļŖźņä▒ņØ┤ ņČ®ļČäĒĢśļŗżĻ│Ā ĒīÉļŗ©ļÉ£ļŗż.